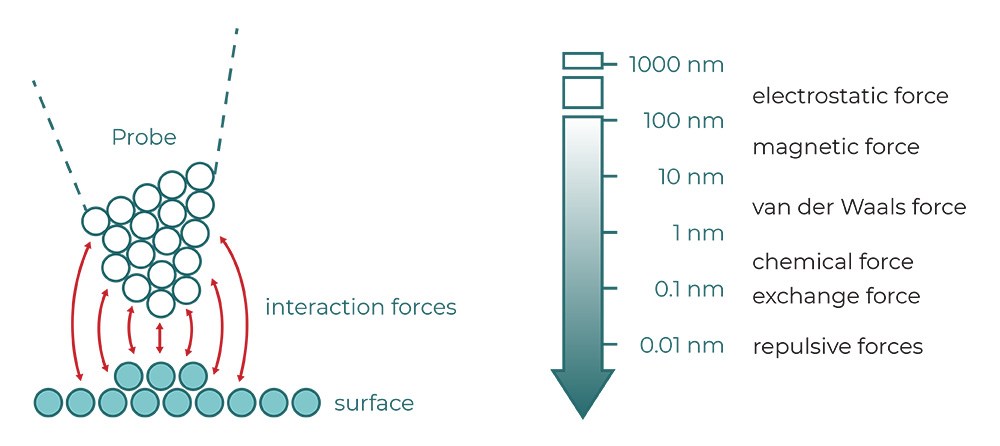
The RPM detects surfaces by measuring the atomic force interaction as a probe tip approaches the target sample.
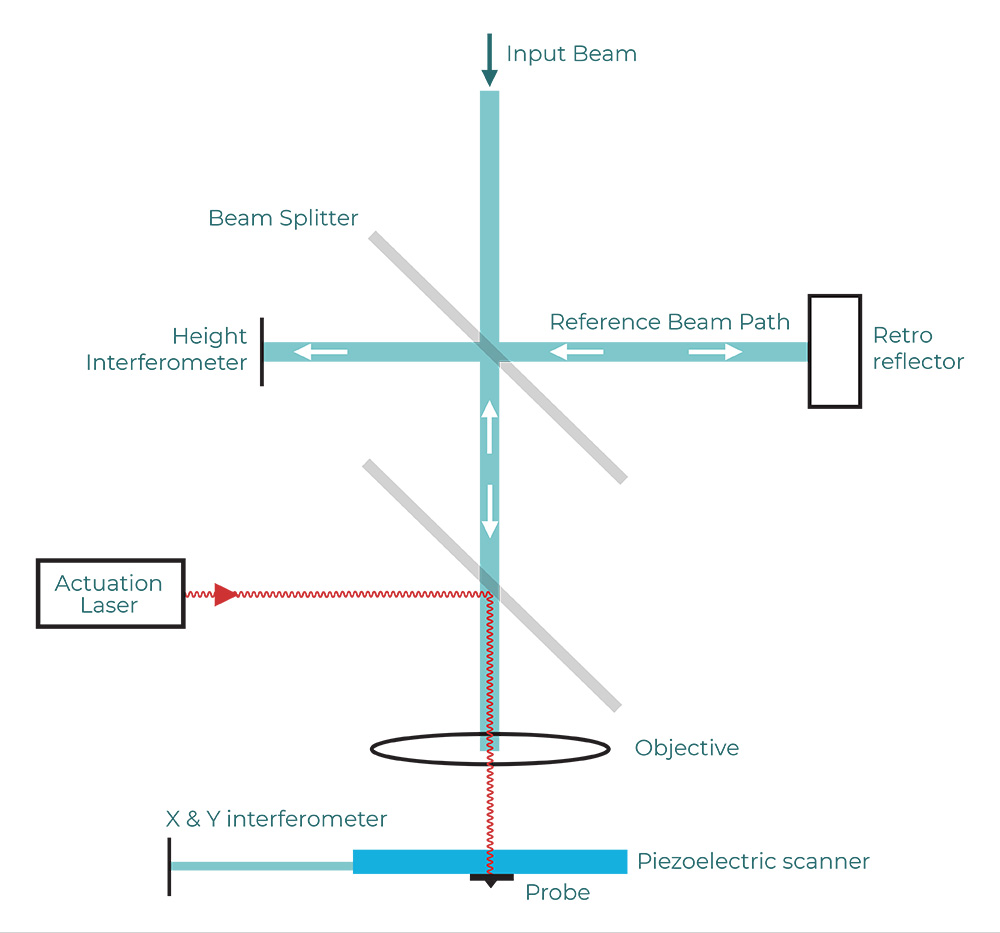
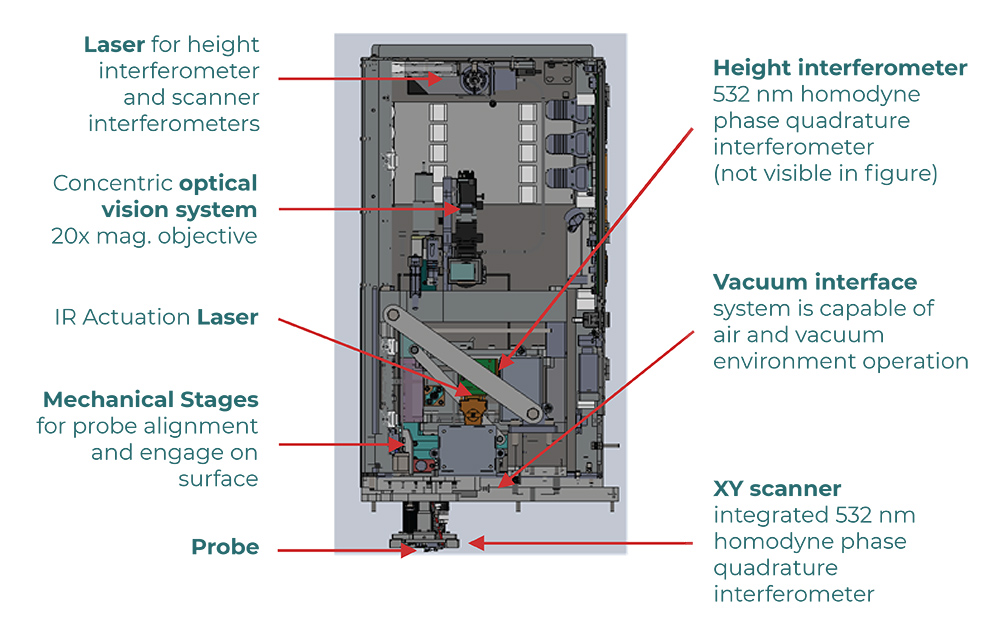
A schematic of the RPM shows the key modules:
- Detection system: Interferometric based which simultaneously measures both the height and deflection of the cantilever. The direct height measurement of the probe is used to construct the height map images of the sample. This direct height measurement is very accurate and enables the collection of artefact free images even at high scan speeds and on patterned structures.
- Probe actuation system: This is built directly into the cantilever, reducing the overall mass of moving components. The actuator acts as a thermal bimorph with an infrared light source heating material with different thermal expansion to control the deflection (and height) of the tip. As a result, very fast response times << 10 microseconds with 100’s nanometers displacement at 100’s kHz frequency enable very fast scanning of the probe.
- Scanner: A piezo electric scanner controls movement of the probe in x, y and z. The x and y control moves the probe across the sample to form an image. The integrated interferometers control the scanner position with picometer resolution.
- Control System: A FPGA based system for high throughput data processing.