
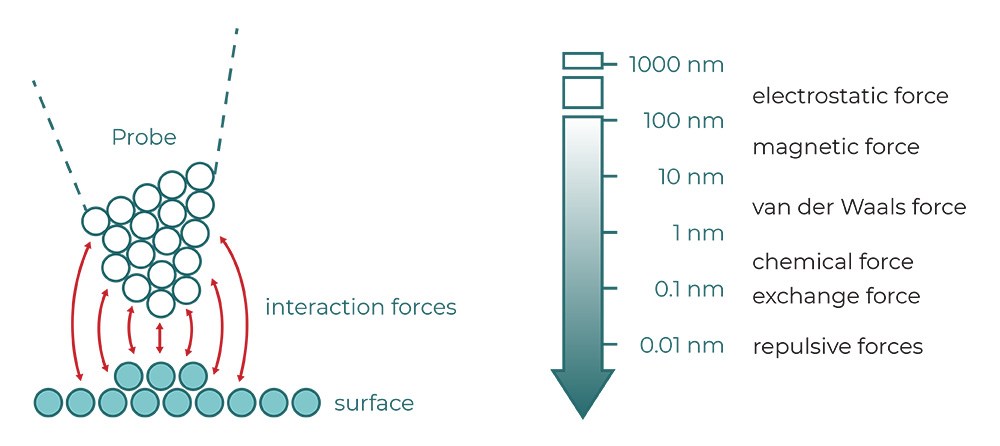
The RPM detects surfaces by measuring the atomic force interaction as a probe tip approaches the target sample.
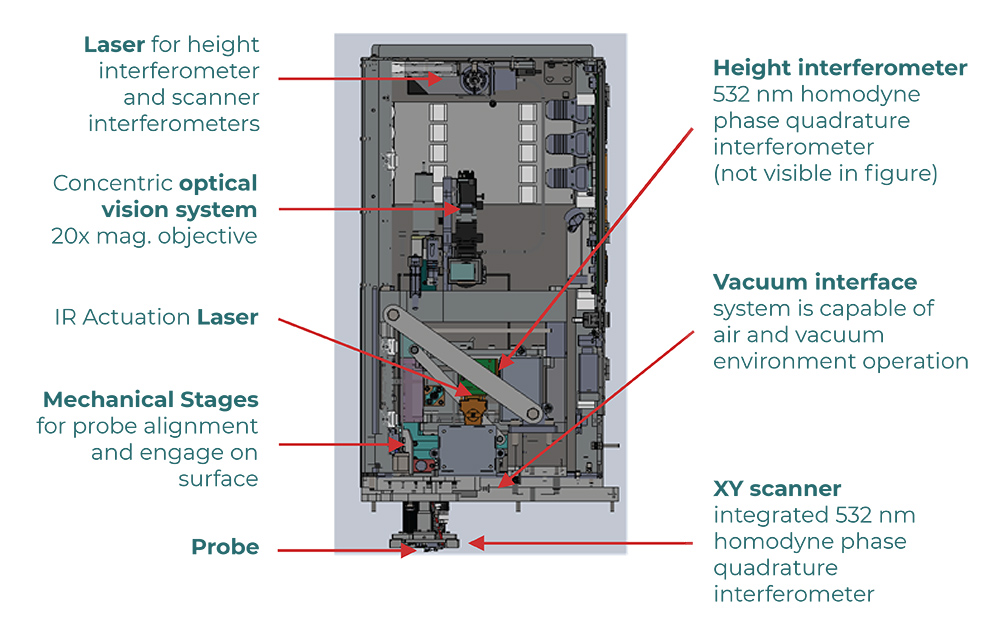
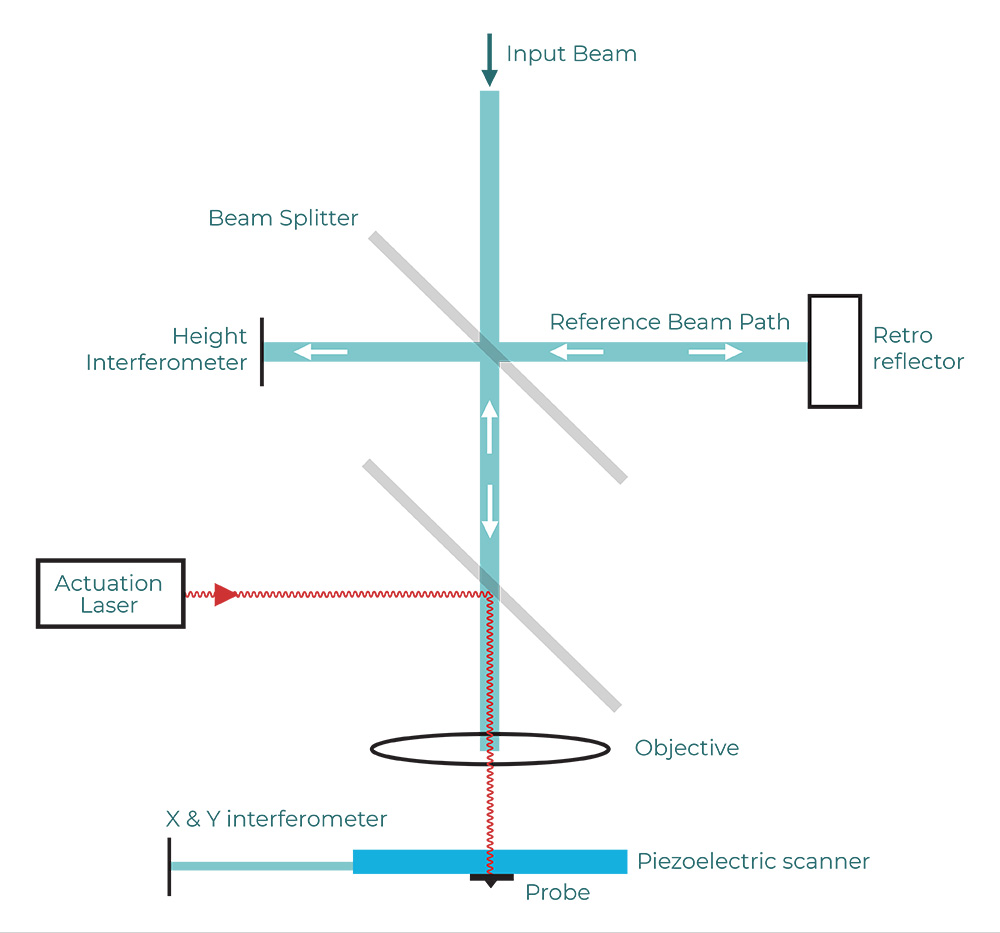
A schematic of the RPM shows the key modules:
The design of the RPM facilitates the implementation of a proprietary mode of operation, Adaptive Drive, which has been developed for the fast imaging of high aspect ratio features. This mode applies both the capability of the RPM to directly measure the height of the probe and the fast actuation of the cantilever.
In contrast to a conventional Scanning Probe Microscope, SPM, Adaptive Drive periodically moves the tip towards and away from the surface to be measured. Each cycle of movement corresponds to a single height measurement, and a single pixel of the height image. The amplitude of the probe is greater than the maximum structure depth. The tip is completely removed from the surface of the sample between each measurement, and this has two key benefits: Firstly, it eliminates lateral forces on the probe, which could occur at abrupt changes in surface topography, thereby improving the lifetime of probes securing a low cost of operation. Secondly the tip velocity is independent of and scan size. The result is faster scan speeds combined with the ability to access smaller structures.
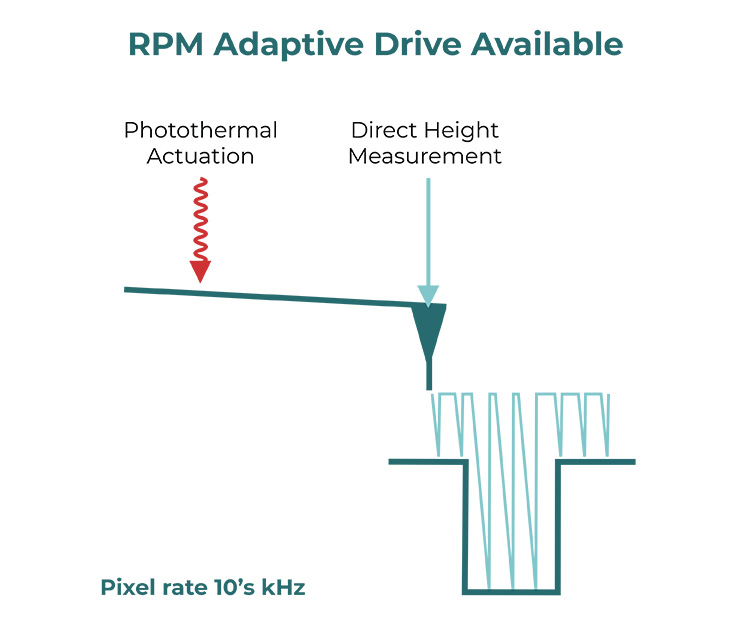
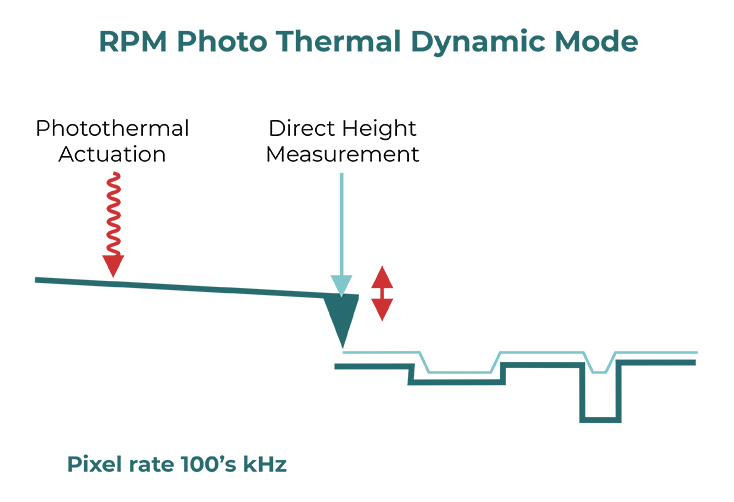
The photothermal actuation of the probe, and the interferometric measurement at the probe tip are also implemented when driving the probe in mode conventional modes. Photothermal Dynamic Mode is designed to take advantage of these features when imaging shallower structures, ca +/- 30nm. The benefit is in the speed of acquisition, with pixel rates >200kHz, enabling image collection in seconds.
Infinitesima Limited
Suite 1, Hitching Court, Abingdon Business Park, Abingdon, Oxfordshire, OX14 1RG, United Kingdom
Telephone: +44 (0)1235 525922
Email: info@infinitesima.com
